What is SLAM (Simultaneous Localisation and Mapping)?
SLAM technology is not only used for robotic developments but also to develop 3D scans of assets. This allows operators the ability to remotely scan the internals and “look” inside vessels without breaking the barrier of Confined Space Entry (CSE) like traditional scanning methods. These 3D scans can then be integrated into a plant’s Digital Twin to bring their company forward into Industry 4.0.
Simultaneous Localisation and Mapping (SLAM) technology helps achieve these goals, by improving operational awareness of robotic systems during inspections and helping with the industry’s overarching goal to eliminate Confined Space Entry (CSE) by 2025. More importantly, SLAM aligns to the technology roadmap needed to achieve autonomous operation of robotic systems.
SLAM enhances the operator’s experience and gives the inspector a sense of awareness while improving their inspection data capture and outcomes.
What is it?
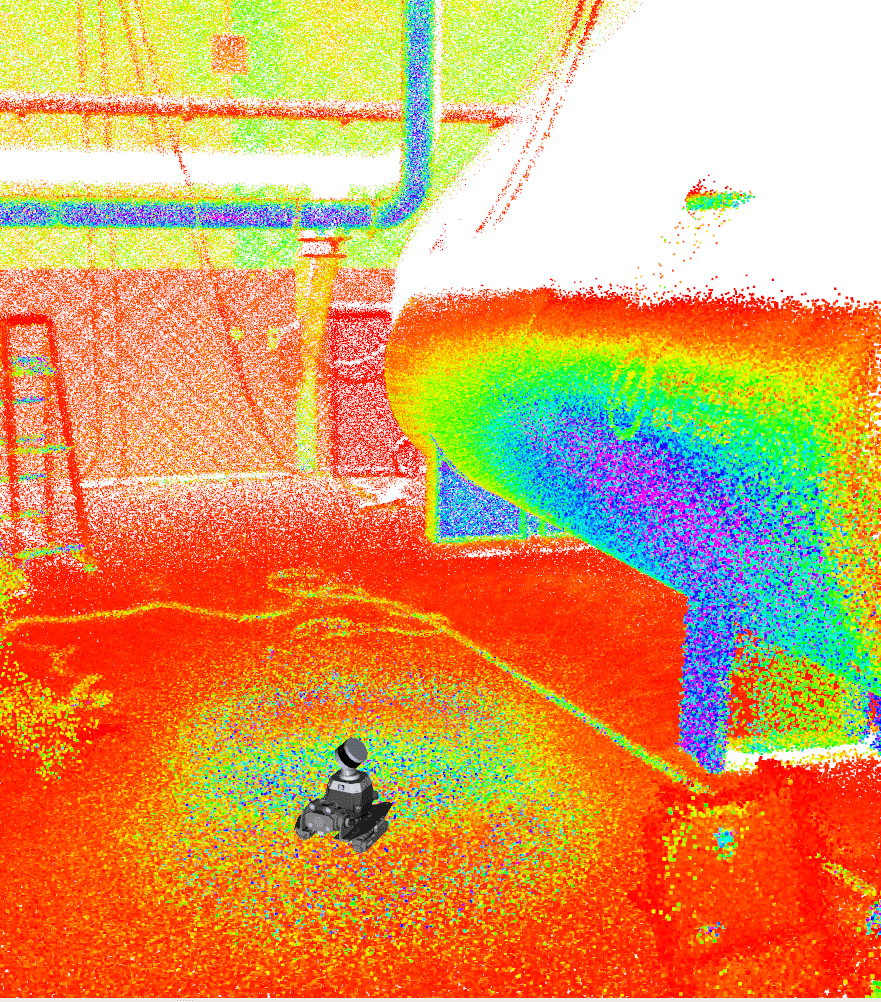
SLAM is an advanced method for the creation of 3D scans in an environment that lacks access to a GPS signal. SLAM algorithms leverage sensor fusion to determine its location in an asset or area, while using sensors to create a 3D map of the environment. This synergy between localisation and mapping enables on-the-go scanning, mitigating the need for much of the pre-planning associated with traditional stationary methods.
How does it work?
SLAM operates by locating where the system is in an environment, while simultaneously building a 3D map of this environment using sensors such as LiDAR, Sonar, or Radar. SLAM systems do not require a GPS signal, instead of using computer vision techniques and IMU data to determine the system’s location.
This advanced localisation is what sets these systems apart from conventional 3D scanners, as traditional methods require the system to be fixed in location. SLAM allows the location of the scanner to be tracked when in motion, enabling these systems to be mounted upon robotic crawlers and driven around inside assets to create internal 3D scans.
Why is it important?
3D mapping generally uses a GPS signal (operating off the GNSS network) to determine the location of the scanner while mapping an environment. When inside tanks and other vessels, this is noted as a ‘GNSS denied environment’ as GPS signals cannot penetrate the walls of the vessel. Thus, requiring scanners to be operated manually in these environments, breaking the barrier of CSE.
Utilising a SLAM based approach enables remote 3D mapping in GNSS denied environments. This allows internal scans of the asset to be generated remotely, mitigating the need for CSE.
The Nexxis approach
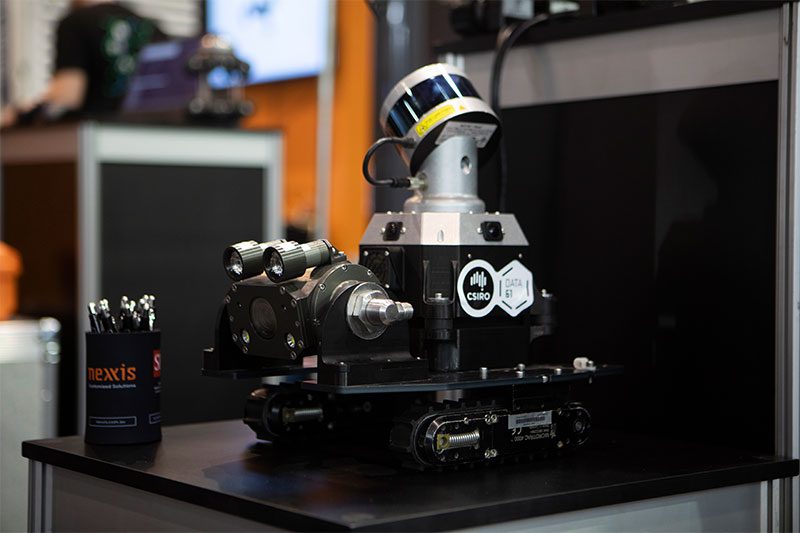
Developed by CSIRO’s Data61 Robotics and Autonomous Systems Group, the CATpack is a SLAM based 3D scanning system leveraging over 15 years of SLAM research and development. Mounting this on one of Nexxis’ robotic crawlers within their fleet allows them to offer unique 3D scanning abilities for their clients. Enabling the internal scanning of assets without breaking the barrier of CSE.
Nexxis are committed to innovating through technology to enhance and deliver the best solutions and user experience, as well as always striving to improve inspection efficiency and maximise vital data collection.
Find out more about the Nexxis solution of flexible, state-of-the-art equipment or contact us today for a no-obligation chat.
