Addressing the Challenges of UT Measurements with Robotic Crawler Technology
The need for regular UT measurements on both internal and external assets often presents multiple challenges. Overcoming them has been a historical headache to achieve, with many unsatisfactory methods trialled over the years.
As robotic technology has advanced, so too have ways to easily gain the data that’s so important to correctly maintain equipment. However, it’s only recently that this has become more widely available and – crucially – commercially viable.
Invert Robotics specialise in such technology and has developed a range of robotic crawler platforms that overcome a variety of inspection challenges. The following looks at 4 prime examples of how state-of-the-art tech has hit the mainstream to provide an easily achievable solution.
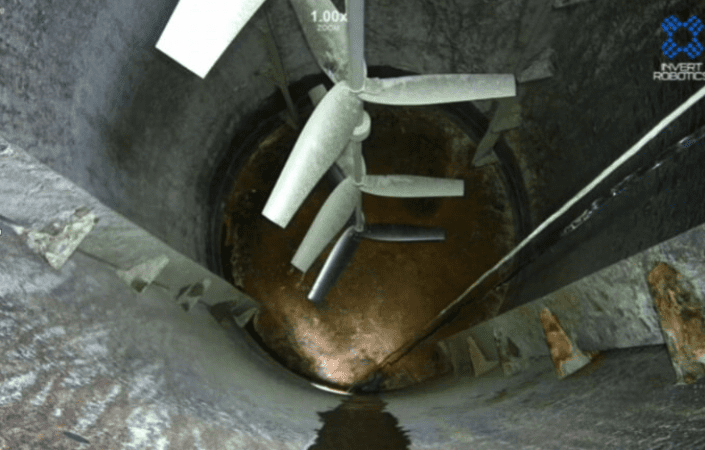
Inspection 1: A Crowded Carbon-Steel Slurry Tank.
This asset, used by a producer of zeolites, presented multiple serious challenges, including:
- An internal agitator
- Baffles running from the top to the bottom of the tank
- Less than pristine state of the asset walls
- An inhospitable environment for human entry
To overcome all of these, the Invert Robotics H2200 hybrid robot was deployed. This unique buggy uses both a vacuum and magnets for adhesion. It’s also highly manoeuvrable and was easily able to traverse the walls, navigate the obstructions and gain traction, even with the high level of deposits. Both B scans and spot measurements are carried out by the Olympus UT equipment that’s an integral element of the crawler.
The result was as follows:
- 60 spot measurements of sufficient quality were obtained
- No human entry into the asset was required
- No extended asset downtime was needed
- The testing was carried out at a far lower cost (monetary and time) than a traditional inspection
Inspection 2: A Coated Carbon-Steel Storage Tank
This asset contained sulfuric acid, meaning that previous testing had required extended downtime and trained inspectors to work in such an area of high toxicity. The hybrid crawler was again the right tool for the job. This has encoder wheels at the front, which is what enables it to carry out the dual task of spot measurements and B scans simultaneously.
The robot was driven over the exterior surface of the tank to gain the required wall thickness measurements. Very little downtime was required and the inspection was carried out by a single operator located a safe distance from the toxic zone.
Inspection 3: Non-ferrous Tank Inspection
This challenging scenario has long been awaiting an effective solution. The asset was a stainless steel Hastelloy tank that, being non-ferrous, couldn’t be scaled by magnetised means. The answer was to use the vacuum V1800 robot with a UT setup with the following results:
- Multiple successful measurements were gathered in all 4 wind directions on both the cylinder and the base.
- There was no need for lengthy downtime or inspection preparation
- The unique robot platform easily adhered to the non-ferrous surface – a unique service carried out with the minimum of effort.
Inspection 4: Carbon-Steel Gas Absorbers With High Levels of Surface Corrosion
Owned by a major energy and waste company in Amsterdam, the surface corrosion was caused by the practice of spraying chalk powder through the system to reduce the acidity of the expelled gas.
The hybrid crawler was, once again, the answer. Even with the corrosion, it easily adhered to the structure and gained 16 B scans of good quality.
Despite presenting dramatically different challenges, the underlying common theme of all these inspections was:
- The speed of inspection
- The gathering of viable data
- No need for human entry into confined or toxic spaces, or for inspectors who were trained to work at height
- No extended downtime
- Dramatically reduced testing costs
The use of such crawlers is proving hugely advantageous within a variety of industries, including oil & gas, mining, construction, energy (and renewable energy), infrastructure and more. Partnering with Nexxis provides a dynamic approach to equipment procurement, whereby we work with you to discover cutting-edge solutions that deliver results and reduce project downtime.
The Invert Robotics Crawler is one such example. This is but one of the robotic systems that we offer, along with other proven technology, including inspection cameras and advanced NDT equipment.
Contact us to find out more about any of our other NDT products, or request a quote online.
Carry on reading How Robots Are Shaking up NDT Inspections to find out more.
